
Założenia projektu
- będzie kontynuacja tematu "Arduino ależ to bardzo proste" prezentowanego w Burzeninie na Zjeździe Technicznym Krótkofalowców w 2015 r
- będzie możliwie proste do wykonania dla nawet niedoświadczonych konstruktorów
- będzie możliwe do wykonania w trakcie trwania Warsztatów SENIOR na Zjeździe Technicznym Krótkofalowców w 2016 roku
- będzie użyteczne dla każdego krótkofalowca
- będzie tanio
Uwaga: Nowa wersja softu 1.05 z dnia 18.09.2016:
- poprawiony błąd ilości cyfr we współczynnikach kalibracyjnych
- dodany nowy współczynnik do kalibracji - nowy arkusz xls służący do kalibracji
Filmy:
(otwierają się w nowym oknie)
- wykład "Arduino SWR Scanner" będący wprowadzeniem teoretycznym do warsztatów SENIOR na Zjeździe Technicznym Krótkofalowców w 2016 roku
- Łukasz SQ2DYL - uczestnik Warsztatów SENIOR na Zjeździe Technicznym prezentuje pomiar anteny GP7DX z użyciem "Arduino SWR scannera"
- Robert SP2ROB - jak zbudować ten scanner na płytce uniwersalnej, co zrobić z "opornym" wyświetlaczem który świeci białym ekranem
Dyskusja:
(otwierają się w nowym oknie)
Opis rozwiązania.
|
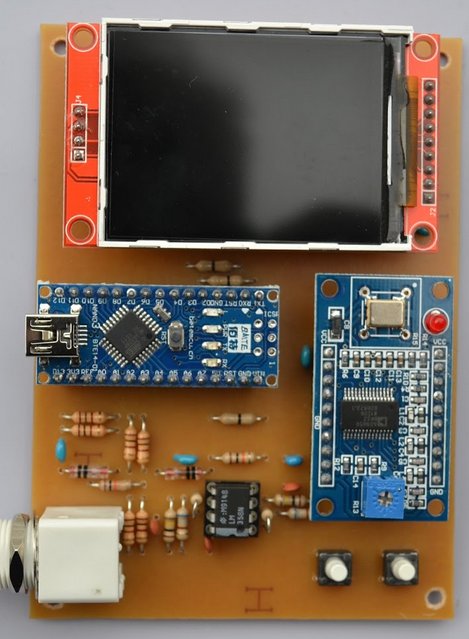
Powyższe założenia spełniły sie w urządzeniu nazwanym "Arduino SWR scanner" służącym do pomiaru SWR anten w zakresie 1..31 MHz czyli we wszystkich krótkofalowych pasmach amatorskich. Konstrukcja powstała na podstawie:
|
  |
Podstawy pomiaru
SWR jest wyliczany na podstawie pomiaru napięć.
Dokładność pomiaru zależy od dokładności pomiaru napięcia oraz od dokładności rezystorów 50ohm.
Zastosowanie rezystorów o tolerancji 1% daje bardzo dobre wyniki bez windowania kosztów elementów.
W przedstawionym rozwiązaniu jako woltomierze zastosowano układy prostujące napięcie w.cz z generatora za pomocą detekcyjnych diod germanowych (sprawdzono z diodami GD507a, DOG55) i pomiar tak uzyskanego napięcia za pomocą wejść analogowych procesora.
Zastosowanie diod ma tą wadę ze charakterystyka diody nie jest liniowa, ale ten problem w oprogramowaniu mojego autorstwa został rozwiązany przez odpowiedni kawałek software i trzypunktową kalibracje przyrządu - kalibracje wykonuje się tylko 1 raz po zmontowaniu przyrządu.
Mostkowy pomiar SWR
|
|
 |
Schemat blokowy:
Konstrukcja
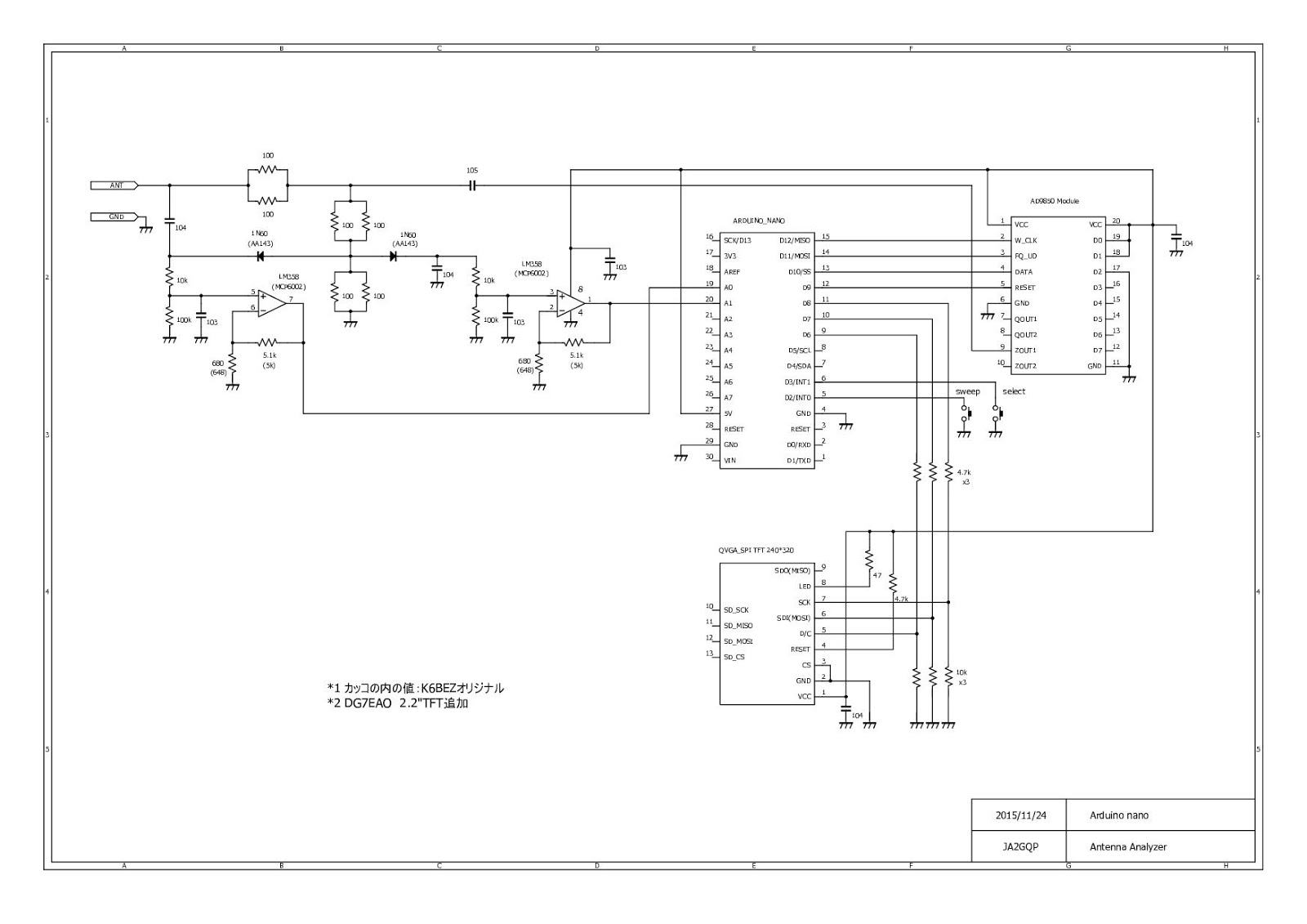
W przyrządzie zachowano oryginalny schemat ideowy wraz z modyfikacjami JA2GQP polegającymi na dołożeniu wyświetlacza TFT.
Pozwala to na samodzielne wgranie oryginalnego oprogramowania JA2QGP i jego modyfikację.
Schemat ideowy i widok płytki drukowanej
 |
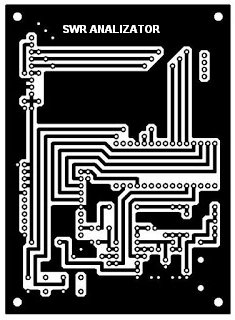 |
Dwa obrazy pomocne przy montażu.
- najpierw montujemy elementy opisane kolorem czarnym, instalujemy arduino, DDS i wyświetlacz
- rezystor Z - czyli R=0Ω -montujemy zworę z drutu
- po podłączeniu zasilania (jeżeli procesor jest zaprogramowany) to powinien pojawić się ekran startowy- montujemy pozostałe elementy
- tu zastosowano wyświetlacz 2.2" ale można zastosować większe wyświetlacze TFT , 2.4", 2.8" sterowane po SPI na chipsecie ILI9341 o rozdzielczości 320x240pixeli i mające taki sam układ pinów np:
http://www.aliexpress.com/af/ili9341-spi-tft.html?ltype=wholesale&d=y&origin=n&isViewCP=y&catId=0&initiative_id=SB_20160920031246&SearchText=ili9341+spi+tft&blanktest=8
wyświetlacz pracuje w logice 3,3V, ale tu zastosowano rezystorowe dzielniki napięcia zamieniające 5V (jak wychodzi z Arduino) na 3,3V jak chce wyświetlacz.
Wyświetlacz ma na pokładzie stabilizator 3,3V - co pozwala zasilać wyświetlacz z napięcia 5V - tak w tym rozwiązaniu jest - należy tylko zwrócić uwagę aby na wyświetlaczu nie było lutowanej zworki - zworka zaznaczona na niebiesko - nie ma być zwarcia na tych pinach: zwarcie - zasilanie 3,3V, przerwa - zasilanie 5V

- wzmacniacz operacyjny - wskazane MCP6002 (lepszy, bo do zastosowań pomiarowych) ale można też LM358
- synteza DSS - moduł na AD9850, ale zastosowanie takiego samego modułu z AD9851 pozwoli uzyskać szerszy zakres pomiarowy (do ok 70MHz) - niemniej pomimo zgodności nóżkowej nie ma zgodności programowej - trzeba wgrać do Arduino oprogramowanie w zależności od użytego modułu DDS - sama wymiana modułu nie wystarczy. O szczegółach związanych z zastosowaniem modułu na AD8951 napisano w --> rozbudowa do 70MHz
Oprogramowanie.
Zachowanie oryginalnego schematu pozwala na wgranie do przyrządu następujących wersji oprogramowania:
- K6BEZ - wersja podstawowa pracująca tylko i wyłącznie we współpracy z PC
źródła wersji oryginalnej dostępne na http://www.hamstack.com/project_antenna_analyzer.html ,
Dostępne jest wiele rożnych modyfikacji softwarowych. - DG7EAO/JA2GQP polegającą na dołożeniu wyświetlacza TFT,
źródła na stronie ( http://ja2gqp.blogspot.com/2015/11/antenna-analyzer-22tft.html - SP3NYR - wersja mojego autorstwa pozwalająca na pracę zarówno z PC jak i autonomiczną,
zawiera programową poprawkę dzięki której po wykalibrowaniu wzrasta dokładność pomiaru
Opis funkcji oprogramowania SP3NYR
Funkcje ogólne
- praca z PC lub praca autonomiczna - wybiera sie każdorazowo po włączeniu zasilania lub zresetowaniu
- współpraca z PC - układ współpracuje z oprogramowaniem zainstalowanym na PC,
Współpraca odbywa sie z wykorzystaniem portu USB.
Oprogramowanie do PC jest standardowe jak dla wszystkich wersji opartych o projekt K6BEZ.
Oprogramowanie do PC dostępne na http://www.hamstack.com/project_antenna_analyzer.html lub na http://www.dg7eao.de/arduino/antennen-analysator/ gdzie znajdziemy też plik źródłowy do samodzielnej modyfikacji i kompilowania programu - praca autonomiczna - pozwala pracować bez PC,
wszystkie wykresy i wyniki są prezentowane na wyświetlaczu TFT - pomiar w zakresie 1..31 MHz, 1..15MHz, 15..31 MHz oraz we wszystkich pasmach KF z marginesem 300kHz przed i po końcu pasma
- możliwość zatrzymania pomiarów
- w trybie autonomicznym wykonywanych jest ok 3 pomiary w przeciągu 2 sek,
co pozwala śledzić na bieżąco proces strojenia - wprowadzenie kalibracji przyrządu pozwala na zastosowanie dowolnych diod germanowych w mostku pomiarowym
- współczynniki kalibracji przechowywane w EPROM, nie jest wymagana kalibracja przyrządu przed pomiarami,
nie tracimy kalibracji po wyłączeniu zasilania - kalibracje dokonuje się bez użycia specjalizowanych przyrządów wystarcza oporniki wzorcowe i komputer z portem USB
- zasilanie jest przez port USB,
przy pracy z PC pobierane z PC,
przy pracy bez PC np z Power Bank
Funkcje przycisków
- przyrząd posiada 2 przyciski służące do sterowania funkcjami.
- Przyciski nazwane są lewy i prawy a ich funkcje opisane są dynamicznie na wyświetlaczu oraz w poniższej tabeli
Stan przyrządu Przycisk lewy Przycisk prawy ekran startowy wybór trybu pracy z PC wybór trybu pracy autonomicznej tryb pracy autonomicznej zatrzymanie/uruchomienie ciągłej sekwencji pomiarów zmiana szerokości pasma pomiarowego Każde naciśniecie powoduje przejście do nowego pasma pomiarowego, po przejściu przez wszystkie pasma pomiarowe cykl zaczyna się od nowa.
1..31 MHz --> 1..15 MHz --> 15..31MHz --> 1,8 MHz -->3,5 MHz --> 7MHz --> 10MHz --> 14MHz -->18MHz -->21MHz --> 24MHz--> 27MHz -->28MHz --> 1..31MHz
tryb pracy z PC wyzwolenie jednokrotnej sekwencji pomiarów jw,
ale wygodniej jest sterować z poziomu programu współpracującego
Wgrywanie oprogramowania.
Do wgrania oprogramowania potrzebne będą
- kabel USB
- program Arduino Bulider - do zaciągnięcia z: http://arduinodev.com/arduino-uploader/
- jeżeli w systemie w brakuje odpowiedniego sterownika to musimy go zainstalować wg opisu
http://itserwer.pl/index.php?option=com_content&view=article&id=68&Itemid=55 - tanie Arduino zawierają chipset CH340 i do takiego instalujemy sterownik
- po zainstalowaniu sterownika wg powyższego opisu znamy numer portu COM
- soft można wgrać do Arduino bez montowania całości, będzie to nawet lepiej bo pomoże sprawdzić montaż urządzenia w połowie obsadzenia elementów
- soft do wgrania jest w załącznikach do tego artykułu)
- uruchamiamy Arduino Bulider i otrzymujemy.

- wybieramy Board type: Arduino Nano (328)
- Ustawiamy zegar - 16MHz
- klik na "Load Sketch/HEX" pozwala na wybranie programu do załadowania
- klik na COMx -z numerem naszego portu powoduje rozpoczęcie procedury wgrywania
- poprawne wgranie kończy się komunikatem
- Nasz miernik należy zrestartować ( o ile sam tego nie zrobił) i powinien działać.
jeżeli ładowana jest wersja softu SP3NYR to nie da się jeszcze wykonywać pomiarów, bo należy dokonać kalibracji

Kalibracja
Błąd pomiaru przed kalibracja pokazano na rysunku (dla zastosowanych diod GD507a)

Do kalibracji zastosowano interpolacje liniową za pomocą linii trendu. Wykres został podzielony na 2 segmenty i każdy z segmentów interpolowano oddzielnie

Powstały w ten sposób 4 współczynniki które należy wpisać do pamięci EPROM .
Powyższe jest zaimplementowane w arkuszu Excel do którego musimy wpisać wyniki pomiarów kalibracyjnych.
Procedura kalibracji.
- potrzebne są oporniki (najlepiej bezindukcyjne) o wartościach 50, 75, 150 Ω
- numer portu COM, ale znamy go bo jest to ten sam co w procedurze wgrywania oprogramowania uruchamiamy dowolny program do komunikacji szeregowej - tu na przykładzie programu HERCULES - bardzo dobry darmowy, również do zastosowań komercyjnych zaciągamy z http://www.hw-group.com/products/hercules/index_en.html, nie wymaga instalacji
- w opcjach startowych Arduino SWR scannera wybieramy pracę z PC
- w programie Hercules otwieramy port COM z numerem znalezionym poprzednio, pozostałe ustawienia jak z rysunku

- pojawienie się "started with PC" oznacza ze możemy rozpocząć procedure kalibracji
- w jednym z pól Send wpisujemy v - komenda do odczytu aktualnych nastaw kalibracji i klikamy Send
odpowiedź jest następująca:
- jak widać są 4 współczynniki kalibracji w,x,y,z - otrzymamy ich wartość z arkusza Excel po pomierzeniu oporników wzorcowych, ale najpierw musimy je ustawić na wartości startowe do kalibracji
- wartość współczynnika ustawia się w sposób następujący: 1234x - ustawia x=1234 czyli w jednym z pól Send wpisujemy 1234x i wciskamy send
tak wykonana komenda nadpisuje wartość współczynnika, wiec jak się pomylimy to wystarczy wykonać komendę jeszcze raz - na poniższym obrazku widać jak ustawić wartości startowe do kalibracji kolorem jest to co poszło do przyrządu, czarnym są odpowiedzi z przyrządu

- jeżeli współczynniki maja wartość jak na powyższym rysunku to podłączamy oporniki wzorcowe w miejsce anteny i otrzymany wynik wpisujemy do arkusza Excela (do pobrania na końcu artykułu)
- Excel wyliczy nam współczynniki, które znana już metoda wpiszemy do przyrządu, poprawnie wpisane współczynniki po odczytaniu powinny dać taki obraz - oczywiście wartości w,x,y,z będą inne bo zależą od indywidualnych charakterystyk elementów użytych do budowy miernika
- od wersji 1.05 jest dodatkowy współczynnik kalibracyjny u, który wpisujemy tak jak pozostałe - korzystając z wyliczeń w arkuszu xls

- miernik został wykalibrowany, można przystąpić do pomiarów.
Praca z PC.
Przyrząd pracuje pod kontrola darmowego oprogramowania - jest to wersja rozwojowa -
źródła dostępne w internecie na http://www.dg7eao.de/arduino/antennen-analysator/
Wersja do zainstalowania/uruchomienia na PC w załącznikach na końcu artykułu.
Poniżej zrzut ekranu.

| [plik hex oprogramowania miernika - wersja oprogramowania 1.04B - czyli z warsztatow Senior na Technicznym Zjeździe Krótkofalowców Burzenin 2016] | 28 kB | |
| [plik hex oprogramowania miernika - wersja oprogramowania 1.05B - czyli z poprawkami po warsztatach Senior na Technicznym Zjeździe Krótkofalowców Burzenin 2016] | 29 kB | |
| [instrukcja montazu na warsztaty Senior na 5 Zjeździe Krótkofalowców SP - Burzenin 2016] | 813 kB | |
| [plik hex - do wgrania wg opisu powyżej - oryginalnej wersji JA2GQP] | 20 kB | |
| [plik źródłowy oryginalnego oprogramowania JA2GQQP do samodzielnej modyfikacji, kompilacji i wgrania] | 3 kB | |
| [Program na PC do współpracy z analizatorem - źródła tego programu dostępne na http://www.dg7eao.de/arduino/antennen-analysator/] | 143 kB | |
| [arkusz Excela automatycznie wyliczający współczynniki kalibracji na podstawie przeprowadzonych pomiarów kalibracyjnych do softu 1.05] | 25 kB | |
| [arkusz Excela automatycznie wyliczający współczynniki kalibracji na podstawie przeprowadzonych pomiarów kalibracyjnych] | 22 kB |